
���}�����@��ѭ�EС܇(ch��)���(l��i)��AGV��С܇(ch��)���ôŗl��(d��o)�����F(xi��n)��С܇(ch��)���m��ʹ��PID���ܡ���Ŀǰ�õ��ǚWķ��CP1E-NA20����ֻ��PIDATָ��f(shu��)����(sh��)���f(shu��)��������C+9�ĵ�15λ��0���_(k��i)�����������ܡ���?y��n)�ѭ�EС܇(ch��)Ҫʹ���A�S푑�(y��ng)�����Ō�(d��o)����(sh��)��(j��)�nj�(sh��)�r(sh��)׃���ģ��_(k��i)�������������ØO��ѭ�h(hu��n)���Ԅ�(d��ng)���PID����(sh��)�ˣ��@��������Ҫ�ģ����C+9�ĵ�15λ���O(sh��)�Þ�0�ˣ����D�е�D10�����O(sh��)�Þ���#8001�����Բ��_(k��i)����������C+9��C+10Ҳ�Ͷ���������
�ҰѴŌ�(d��o)���ą���(sh��)�D(zhu��n)�Q����1-31��һ��31��(g��)��(sh��)��(j��)��ѭ�EС܇(ch��)�����Еr(sh��)��(sh��)��(j��)��(y��ng)ԓ��16������16����PIDAT��Ŀ��(bi��o)ֵ���D��D1�����](m��i)��(w��n)�}��PIDAT�Ĝy(c��)��ֵ���D��D0���nj�(sh��)�r(sh��)��ݔ�^(gu��)��(l��i)�ģ����Ԯ�(d��ng)��������16�ĕr(sh��)��PIDAT��(y��ng)ԓ��ݔ���Ō�(du��)����֪��PIDATʹ�Õr(sh��)����ʹ���x��ģ�M����Ҳ�ǂ�ݔ?sh��)�С�?ch��)�Ϝy(c��)ԇ�ģ�����ʼ�K�](m��i)��ݔ����
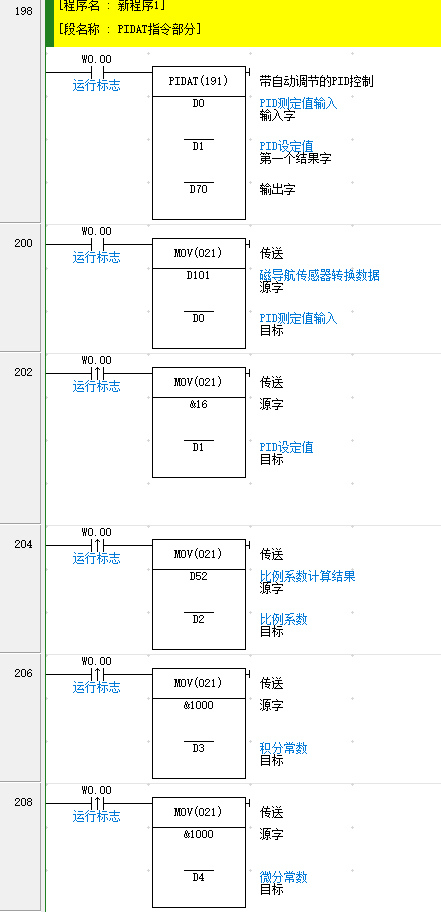
�@������ʹ�������PLC�ǿ��еģ����ǚWķ���@��(g��)�](m��i)ݔ������ô���£������͎�æ�
D0��PID�y(c��)��ֵ������(j��)�ŗl�z�y(c��)λ�Ï�1-31׃��
D1��PID�O(sh��)��ֵ����16����1-31�������g
D2�DZ���ϵ��(sh��)��Ҳ�nj�(sh��)�r(sh��)��ݔ?sh��)ġ����O(sh��)���Ō�(d��o)���z�y(c��)��߅���������ϵ��(sh��)�������g�͜pС����ϵ��(sh��)
D3��D4�քe�Ƿe�ֳ���(sh��)���ֳ���(sh��)
D5�Dzɘ����ڣ����O(sh��)��0.2�룬�h(yu��n)���ڒ�������
D6�ǞV��ϵ��(sh��)���f(shu��)����(sh��)�f(shu��)һ���O(sh��)��0.65����
D7��һЩ�O(sh��)����Ҳ�ǰ���Ҏ(gu��)���O(sh��)����
D8��D9�nj�(du��)PIDAT�\(y��n)����ݔ��ֵ����С������
�@Щ�O(sh��)�����](m��i)��(w��n)�}����ʲôPIDAT�](m��i)���κ�ݔ����ݔ��ʼ�K��0�أ�
 �����W(w��ng)����31010802001143̖(h��o)
�����W(w��ng)����31010802001143̖(h��o)

